6 Predicting Growth
6.5 The Tabular Method for Singly-Structurally-Recursive Functions |
We will now commence the study of determining how long a computation takes. We’ll begin with a little (true) story.
6.1 A Little (True) Story
My student Debbie recently wrote tools to analyze data for a startup. The company collects information about product scans made on mobile phones, and Debbie’s analytic tools classified these by product, by region, by time, and so on. As a good programmer, Debbie first wrote synthetic test cases, then developed her programs and tested them. She then obtained some actual test data from the company, broke them down into small chunks, computed the expected answers by hand, and tested her programs again against these real (but small) data sets. At the end of this she was ready to declare the programs ready.
The company was rightly reluctant to share the entire dataset with outsiders, and in turn we didn’t want to be responsible for carefully guarding all their data.
Even if we did get a sample of their data, as more users used their product, the amount of data they had was sure to grow.
Debbie was given 100,000 data points. She broke them down into input sets of 10, 100, 1,000, 10,000, and 100,000 data points, ran her tools on each input size, and plotted the result.
From this graph we have a good bet at guessing how long the tool would take on a dataset of 50,000. It’s much harder, however, to be sure how long it would take on datasets of size 1.5 million or 3 million or 10 million.These processes are respectively called interpolation and extrapolation. We’ve already explained why we couldn’t get more data from the company. So what could we do?
As another problem, suppose we have multiple implementations available. When we plot their running time, say the graphs look like this, with red, green, and blue each representing different implementations. On small inputs, suppose the running times look like this:
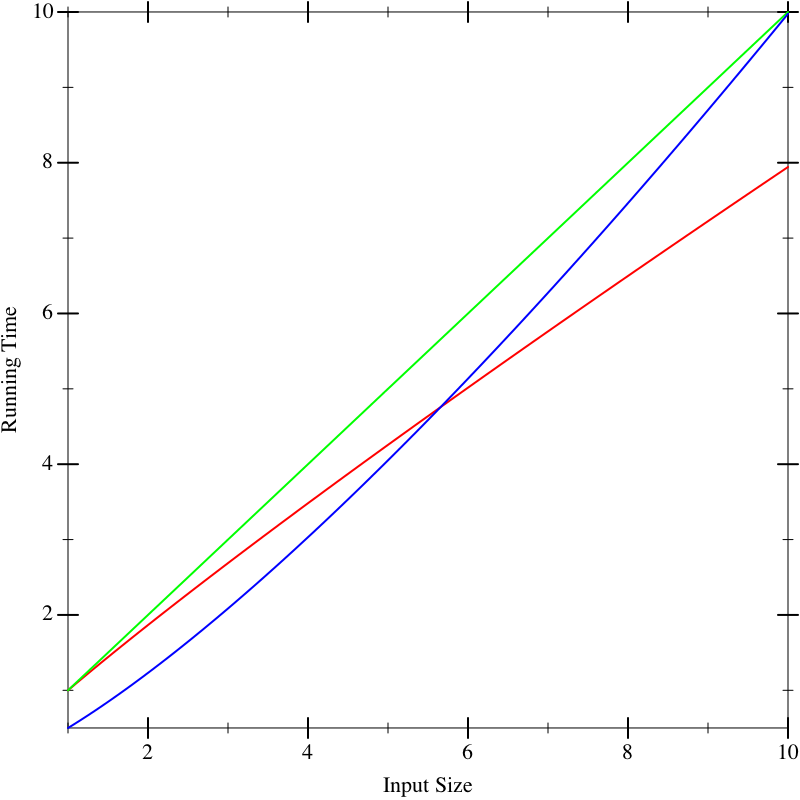
This doesn’t seem to help us distinguish between the implementations. Now suppose we run the algorithms on larger inputs, and we get the following graphs:
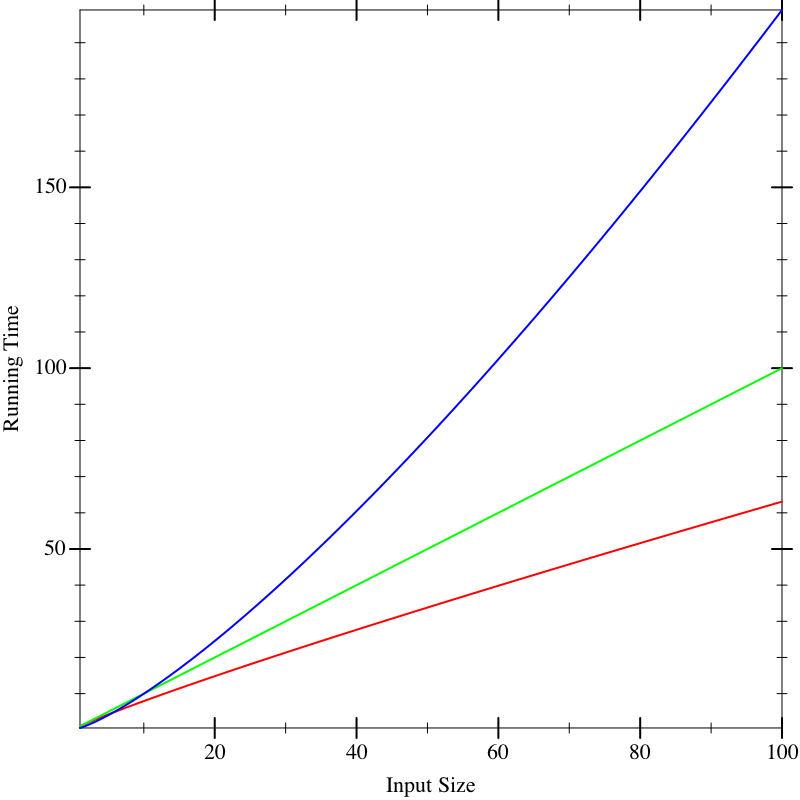
Now we seem to have a clear winner (red), though it’s not clear there is much to give between the other two (blue and green). But if we calculate on even larger inputs, we start to see dramatic differences:
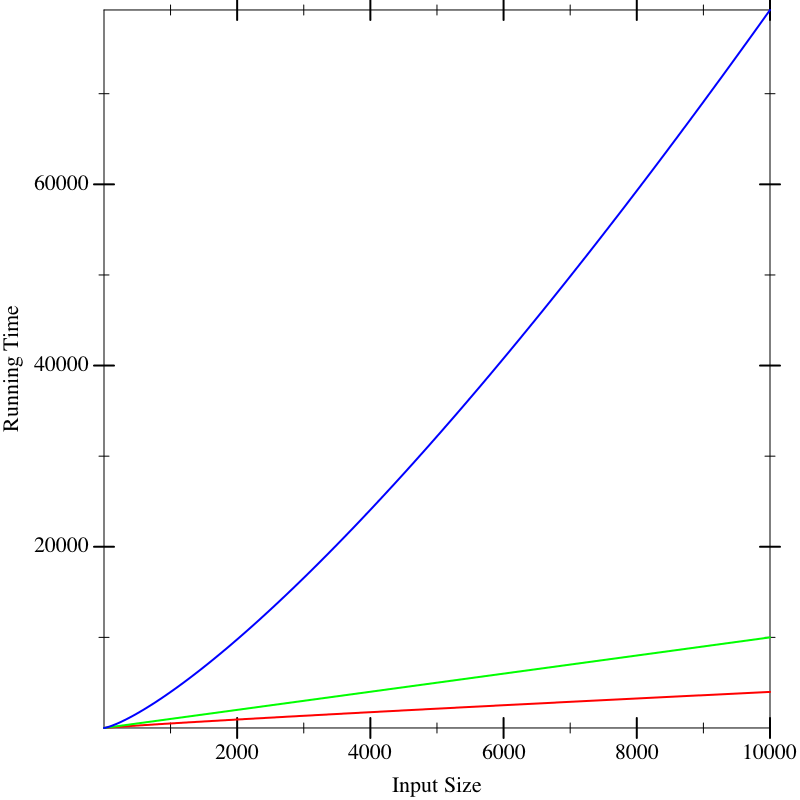
In fact, the functions that resulted in these lines were the same in all three figures. What these pictures tell us is that it is dangerous to extrapolate too much from the performance on small inputs. If we could obtain closed-form descriptions of the performance of computations, it would be nice if we could compare them better. That is what we will now do.
6.2 The Analytical Idea
With many physical processes, the best we can do is obtain as many data points as possible, extrapolate, and apply statistics to reason about the most likely outcome. Sometimes we can do that in computer science, too, but fortunately we computer scientists have an enormous advantage over most other sciences: instead of measuring a black-box process, we have full access to its internals, namely the source code. This enables us to apply analytical methods.“Analytical” means applying algebraic and other mathematical methods to make predictive statements about a process without running it. The answer we compute this way is complementary to what we obtain from the above experimental analysis, and in practice we will usually want to use a combination of the two to arrive a strong understanding of the program’s behavior.
The analytical idea is startlingly simple. We look at the source of the program and list the operations it performs. For each operation, we look up what it costs.We are going to focus on one kind of cost, namely running time. There are many other other kinds of costs one can compute. We might naturally be interested in space (memory) consumed, which tells us how big a machine we need to buy. We might also care about power, this tells us the cost of our energy bills, or of bandwidth, which tells us what kind of Internet connection we will need. In general, then, we’re interested in resource consumption. In short, don’t make the mistake of equating “performance” with “speed”: the costs that matter depend on the context in which the application runs. We add up these costs for all the operations. This gives us a total cost for the program.
Naturally, for most programs the answer will not be a constant number. Rather, it will depend on factors such as the size of the input. Therefore, our answer is likely to be an expression in terms of parameters (such as the input’s size). In other words, our answer will be a function.
There are many functions that can describe the running-time of a function. Often we want an upper bound on the running time: i.e., the actual number of operations will always be no more than what the function predicts. This tells us the maximunm resource we will need to allocate. Another function may present a lower bound, which tells us the least resource we need. Sometimes we want an average-case analysis. And so on. In this text we will focus on upper-bounds, but keep in mind that all these other analyses are also extremely valuable.
It is incorrect to speak of “the” upper-bound function, because there isn’t just one. Given one upper-bound function, can you construct another one?
6.3 A Cost Model for Pyret Running Time
We begin by presenting a cost model for the running time of Pyret programs. We are interested in the cost of running a program, which is tantamount to studying the expressions of a program. Simply making a definition does not cost anything; the cost is incurred only when we use a definition.
We will use a very simple (but sufficiently accurate) cost model: every operation costs one unit of time in addition to the time needed to evaluate its sub-expressions. Thus it takes one unit of time to look up a variable or to allocate a constant. Applying primitive functions also costs one unit of time. Everything else is a compound expression with sub-expressions. The cost of a compound expression is one plus that of each of its sub-expressions. For instance, the running time cost of the expression e1 + e2 (for some sub-expressions e1 and e2) is the running time for e1 + the running time for e2 + 1. Thus the expression 17 + 29 has a cost of 3 (one for each sub-expression and one for the addition); the expression 1 + (7 * (2 / 9)) costs 7.
First, we are using an abstract rather than concrete notion of time. This is unhelpful in terms of estimating the so-called “wall clock” running time of a program, but then again, that number depends on numerous factors—
not just what kind of processor and how much memory you have, but even what other tasks are running on your computer at the same time. In contrast, abstract time units are more portable. Second, not every operation takes the same number of machine cycles, whereas we have charged all of them the same number of abstract time units. As long as the actual number of cycles each one takes is bounded by a constant factor of the number taken by another, this will not pose any mathematical problems for reasons we will soon understand (Comparing Functions).
6.4 The Size of the Input
We are
going to gloss over how to measure the size of a number. Observe that
the value of a number is exponentially larger than its
size: given three spaces we can write 1,000 different natural
numbers, but given a fourth space we can write not 1,001 but 10,000
different numbers. Thus, when studying functions over numbers, the
space we charge should be only logarithmic in the value. This
distinction will not matter for the programs we work with in this
text, so we permit ourselves the fiction of equating value and size.
In programs where numbers are central—
It can be subtle to define the size of the argument. Suppose a function consumes a list of numbers; it would be natural to define the size of its argument to be the length of the list, i.e., the number of links in the list. We could also define it to be twice as large, to account for both the links and the individual numbers (but as we’ll see (Comparing Functions), constants usually don’t matter). But suppose a function consumes a list music albums, and each music album is itself a list of songs, each of which has information about singers and so on. Then how we measure the size depends on what part of the input the function being analyzed actually examines. If, say, it only returns the length of the list of albums, then it is indifferent to what each list element contains [REF para poly], and only the length of the list of albums matters. If, however, the function returns a list of all the singers on every album, then it traverses all the way down to individual songs, and we have to account for all these data. In short, we care about the size of the data potentially accessed by the function.
6.5 The Tabular Method for Singly-Structurally-Recursive Functions
Given sizes for the arguments, we simply examine the body of the function and add up the costs of the individual operations. Most interesting functions are, however, conditionally defined, and may even recur. Here we will assume there is only one structural recursive call. We will get to more general cases in a bit [Creating Recurrences].
When we have a function with only one recursive call, and it’s structural, there’s a handy technique we can use to handle conditionals.This idea is due to Prabhakar Ragde. We will set up a table. It won’t surprise you to hear that the table will have as many rows as the cond has clauses. But instead of two columns, it has seven! This sounds daunting, but you’ll soon see where they come from and why they’re there.
|Q|: the number of operations in the question
#Q: the number of times the question will execute
TotQ: the total cost of the question (multiply the previous two)
|A|: the number of operations in the answer
#A: the number of times the answer will execute
TotA: the total cost of the answer (multiply the previous two)
Total: add the two totals to obtain an answer for the clause
In the process of computing these costs, we may come across recursive calls in an answer expression. So long as there is only one recursive call in the entire answer, ignore it.
Once you’ve read the material on Creating Recurrences, come back to this and justify why it is okay to just skip the recursive call. Explain in the context of the overall tabular method.
Excluding the treatment of recursion, justify (a) that these columns are individually accurate (e.g., the use of additions and multiplications is appropriate), and (b) sufficient (i.e., combined, they account for all operations that will be performed by that cond clause).
fun len(l): cases (List) l: | empty => 0 | link(f, r) => 1 + len(r) end end
Because the entire body of len is given by a conditional, we can proceed directly to building the table.
Let’s consider the first row. The question costs three units (one each to evaluate empty? and l, and one to apply the function). This is evaluated once per element in the list and once more when the list is empty, i.e., \(k+1\) times. The total cost of the question is thus \(3(k+1)\). The answer takes one unit of time to compute, and is evaluated only once (when the list is empty). Thus it takes a total of one unit, for a total of \(3k+4\) units.
Now for the second row. The question again costs three units, and is evaluated \(k\) times. The answer involves 3 units to evaluate (rest l), two more to evaluate and apply add1, one more to evaluate len...and no more, because we are ignoring the time spent in the recursive call itself. In short, it takes six units of time (in addition to the recursion we’ve chosen to ignore).
|Q| |
| #Q |
| TotQ |
| |A| |
| #A |
| TotA |
| Total |
\(3\) |
| \(k+1\) |
| \(3(k+1)\) |
| \(1\) |
| \(1\) |
| \(1\) |
| \(3k+4\) |
\(3\) |
| \(k\) |
| \(3k\) |
| \(6\) |
| \(k\) |
| \(6k\) |
| \(9k\) |
How accurate is this estimate? If you try applying len to different sizes of lists, do you obtain a consistent estimate for \(k\)?
6.6 Creating Recurrences
We will now see a systematic way of analytically computing the time of a program. Suppose we have only one function f. We will define a function, \(T\), to compute an upper-bound of the time of f.In general, we will have one such cost function for each function in the program. In such cases, it would be useful to give a different name to each function to easily tell them apart. Since we are looking at only one function for now, we’ll reduce notational overhead by having only one \(T\). \(T\) takes as many parameters as f does. The parameters to \(T\) represent the sizes of the corresponding arguments to f. Eventually we will want to arrive at a closed form solution to \(T\), i.e., one that does not refer to \(T\) itself. But the easiest way to get there is to write a solution that is permitted to refer to \(T\), called a recurrence relation, and then see how to eliminate the self-reference [REF].
We repeat this procedure for each function in the program in turn. If there are many functions, first solve for the one with no dependencies on other functions, then use its solution to solve for a function that depends only on it, and progress thus up the dependency chain. That way, when we get to a function that refers to other functions, we will already have a closed-form solution for the referred function’s running time and can simply plug in parameters to obtain a solution.
The strategy outlined above doesn’t work when there are functions that depend on each other. How would you generalize it to handle this case?
The process of setting up a recurrence is easy. We simply define the right-hand-side of \(T\) to add up the operations performed in f’s body. This is straightforward except for conditionals and recursion. We’ll elaborate on the treatment of conditionals in a moment. If we get to a recursive call to f on the argument a, in the recurrence we turn this into a (self-)reference to \(T\) on the size of a.
For conditionals, we use only the |Q| and |A| columns of
the corresponding table. Rather than multiplying by the size of the
input, we add up the operations that happen on one invocation of
f other than the recursive call, and then add the cost of the
recursive call in terms of a reference to \(T\). Thus, if we were
doing this for len above, we would define \(T(k)\)—
Why can we assume that for a list \(p\) elements long, \(p \geq 0\)? And why did we take the trouble to explicitly state this above?
With some thought, you can see that the idea of constructing a recurrence works even when there is more than one recursive call, and when the argument to that call is one element structurally smaller. What we haven’t seen, however, is a way to solve such relations in general. That’s where we’re going next (Solving Recurrences).
6.7 A Notation for Functions
We have seen above that we can describe the running time of len
through a function. We don’t have an especially good notation for
writing such (anonymous) functions. Wait, we
do—
6.8 Comparing Functions
Let’s return to the running time of len. We’ve written down a function of great precision: 12! 4! Is this justified?
At a fine-grained level already, no, it’s not. We’ve lumped many operations, with different actual running times, into a cost of one. So perhaps we should not worry too much about the differences between, say, \([k \rightarrow 12k + 4]\) and \([k \rightarrow 4k + 10]\). If we were given two implementations with these running times, it’s likely that we would pick other characteristics to choose between them.
What this boils down to is being able to compare two
functions—
Obviously, the “bigger” function is likely to be a less useful bound than a “tighter” one. That said, it is conventional to write a “minimal” bound for functions, which means avoiding unnecessary constants, sum terms, and so on. The justification for this is given below (Combining Big-Oh Without Woe).
Note carefully the order of identifiers. We must be able to pick the
constant \(c\) up front for this relationship to hold. Had we swapped
the order, it would mean that for every point along the number line,
there must exist a constant—
This definition has more flexibility than we might initially think. For instance, consider our running example compared with \([k \rightarrow k^2]\). Clearly, the latter function eventually dominates the former: i.e., \[[k \rightarrow 12k+4] \leq [k \rightarrow k^2]\] We just need to pick a sufficiently large constant and we will find this to be true.
What is the smallest constant that will suffice?
You will find more complex definitions in the literature and they all have merits, because they enable us to make finer-grained distinctions than this definition allows. For the purpose of this book, however, the above definition suffices.
Observe that for a given function \(f\), there are numerous functions that are less than it. We use the notation \(O(\cdot)\) to describe this family of functions.In computer science this is usually pronounced “big-Oh”, though some prefer to call it the Bachmann-Landau notation after its originators. Thus if \(g \leq f\), we can write \(g \in O(f)\), which we can read as “\(f\) is an upper-bound for \(g\)”. Thus, for instance, \[[k \rightarrow 3k] \in O([k \rightarrow 4k+12])\] \[[k \rightarrow 4k+12] \in O([k \rightarrow k^2])\] and so on.
Pay especially close attention to our
notation. We write \(\in\)
rather than \(=\) or some other symbol, because \(O(f)\) describes a
family of functions of which \(g\) is a member. We also write \(f\)
rather than \(f(x)\) because we are comparing
functions—
This is not the only notion of function comparison that we can have. For instance, given the definition of \(\leq\) above, we can define a natural relation \(<\). This then lets us ask, given a function \(f\), what are all the functions \(g\) such that \(g \leq f\) but not \(g < f\), i.e., those that are “equal” to \(f\).Look out! We are using quotes because this is not the same as ordinary function equality, which is defined as the two functions giving the same answer on all inputs. Here, two “equal” functions may not give the same answer on any inputs. This is the family of functions that are separated by at most a constant; when the functions indicate the order of growth of programs, “equal” functions signify programs that grow at the same speed (up to constants). We use the notation \(\Theta(\cdot)\) to speak of this family of functions, so if \(g\) is equivalent to \(f\) by this notion, we can write \(g \in \Theta(f)\) (and it would then also be true that \(f \in \Theta(g)\)).
Convince yourself that this notion of function equality is an equivalence relation, and hence worthy of the name “equal”. It needs to be (a) reflexive (i.e., every function is related to itself); (b) antisymmetric (if \(f \leq g\) and \(g \leq f\) then \(f\) and \(g\) are equal); and (c) transitive (\(f \leq g\) and \(g \leq h\) implies \(f \leq h\)).
6.9 Combining Big-Oh Without Woe
Suppose we have a function f (whose running time is) in \(O(F)\). Let’s say we run it \(p\) times, for some given constant. The running time of the resulting code is then \(p \times O(F)\). However, observe that this is really no different from \(O(F)\): we can simply use a bigger constant for \(c\) in the definition of \(O(\cdot)\)—
in particular, we can just use \(pc\). Conversely, then, \(O(pF)\) is equivalent to \(O(F)\). This is the heart of the intution that “multiplicative constants don’t matter”. Suppose we have two functions, f in \(O(F)\) and g in \(O(G)\). If we run f followed by g, we would expect the running time of the combination to be the sum of their individual running times, i.e., \(O(F) + O(G)\). You should convince yourself that this is simply \(O(F + G)\).
Suppose we have two functions, f in \(O(F)\) and g in \(O(G)\). If f invokes g in each of its steps, we would expect the running time of the combination to be the product of their individual running times, i.e., \(O(F) \times O(G)\). You should convince yourself that this is simply \(O(F \times G)\).
|Q| |
| #Q |
| TotQ |
| |A| |
| #A |
| TotA |
| Total |
\(O(1)\) |
| \(O(k)\) |
| \(O(k)\) |
| \(O(1)\) |
| \(O(1)\) |
| \(O(1)\) |
| \(O(k)\) |
\(O(1)\) |
| \(O(k)\) |
| \(O(k)\) |
| \(O(1)\) |
| \(O(k)\) |
| \(O(k)\) |
| \(O(k)\) |
6.10 Solving Recurrences
There is a great deal of literature on solving recurrence equations. In this section we won’t go into general techniques, nor will we even discuss very many different recurrences. Rather, we’ll focus on just a handful that should be in the repertoire of every computer scientist. You’ll see these over and over, so you should instinctively recognize their recurrence pattern and know what complexity they describe (or know how to quickly derive it).
Earlier we saw a recurrence that had two cases: one for the empty input and one for all others. In general, we should expect to find one case for each non-recursive call and one for each recursive one, i.e., roughly one per cases clause. In what follows, we will ignore the base cases so long as the size of the input is constant (such as zero or one), because in such cases the amount of work done will also be a constant, which we can generally ignore (Comparing Functions).
\(T(k)\)
=
\(T(k-1) + c\)
=
\(T(k-2) + c + c\)
=
\(T(k-3) + c + c + c\)
=
...
=
\(T(0) + c \times k\)
=
\(c_0 + c \times k\)
Thus \(T \in O([k \rightarrow k])\). Intuitively, we do a constant amount of work (\(c\)) each time we throw away one element (\(k-1\)), so we do a linear amount of work overall.\(T(k)\)
=
\(T(k-1) + k\)
=
\(T(k-2) + (k-1) + k\)
=
\(T(k-3) + (k-2) + (k-1) + k\)
=
...
=
\(T(0) + (k-(k-1)) + (k-(k-2)) + \cdots + (k-2) + (k-1) + k\)
=
\(c_0 + 1 + 2 + \cdots + (k-2) + (k-1) + k\)
=
\(c_0 + {{k \cdot (k+1)}\over{2}}\)
Thus \(T \in O([k \rightarrow k^2])\). This follows from the solution to the sum of the first \(k\) numbers.\(T(k)\)
=
\(T(k/2) + c\)
=
\(T(k/4) + c + c\)
=
\(T(k/8) + c + c + c\)
=
...
=
\(T(k/2^{\log_2 k}) + c \cdot \log_2 k\)
=
\(c_1 + c \cdot \log_2 k\)
Thus \(T \in O([k \rightarrow \log k])\). Intuitively, we’re able to do only constant work (\(c\)) at each level, then throw away half the input. In a logarithmic number of steps we will have exhausted the input, having done only constant work each time. Thus the overall complexity is logarithmic.\(T(k)\)
=
\(T(k/2) + k\)
=
\(T(k/4) + k/2 + k\)
=
...
=
\(T(1) + k/2^{\log_2 k} + \cdots + k/4 + k/2 + k\)
=
\(c_1 + k(1/2^{\log_2 k} + \cdots + 1/4 + 1/2 + 1)\)
=
\(c_1 + 2k\)
Thus \(T \in O([k \rightarrow k])\). Intuitively, the first time your process looks at all the elements, the second time it looks at half of them, the third time a quarter, and so on. This kind of successive halving is equivalent to scanning all the elements in the input a second time. Hence this results in a linear process.\(T(k)\)
=
\(2T(k/2) + k\)
=
\(2(2T(k/4) + k/2) + k\)
=
\(4T(k/4) + k + k\)
=
\(4(2T(k/8) + k/4) + k + k\)
=
\(8T(k/8) + k + k + k\)
=
...
=
\(2^{\log_2 k} T(1) + k \cdot \log_2 k\)
=
\(k \cdot c_1 + k \cdot \log_2 k\)
Thus \(T \in O([k \rightarrow k \cdot \log k])\). Intuitively, each time we’re processing all the elements in each recursive call (the \(k\)) as well as decomposing into two half sub-problems. This decomposition gives us a recursion tree of logarithmic height, at each of which levels we’re doing linear work.\(T(k)\)
=
\(2T(k-1) + c\)
=
\(2T(k-1) + (2-1)c\)
=
\(2(2T(k-2) + c) + (2-1)c\)
=
\(4T(k-2) + 3c\)
=
\(4T(k-2) + (4-1)c\)
=
\(4(2T(k-3) + c) + (4-1)c\)
=
\(8T(k-3) + 7c\)
=
\(8T(k-3) + (8-1)c\)
=
...
=
\(2^k T(0) + (2^k-1)c\)
Thus \(T \in O([k \rightarrow 2^k])\). Disposing of each element requires doing a constant amount of work for it and then doubling the work done on the rest. This successive doubling leads to the exponential.
Using induction, prove each of the above derivations.